Robots setup and network configuration¶
Before using TDK, ensure that the robots are properly mounted and the network is correctly configured. TDK supports both local area network (LAN) and wide area network (WAN) deployments. The following section uses a LAN setup as an example to describe the network configuration for the robots and the user computer.
⚠️ Important¶
Please make sure all robots are well mounted on a fixed base and are powered on before proceeding to the next step.
Step 1: Power on and servo on the robots¶
Follow instructions in the provided Quick Start Guide to complete hardware setup and boot up the two robots. After booting up, connect the robots to the UI tablet (Flexiv Elements). All the light rings on the robots should be deep blue if they are powered on and servo on.
Step 2: Enable Remote Mode - Ethernet¶
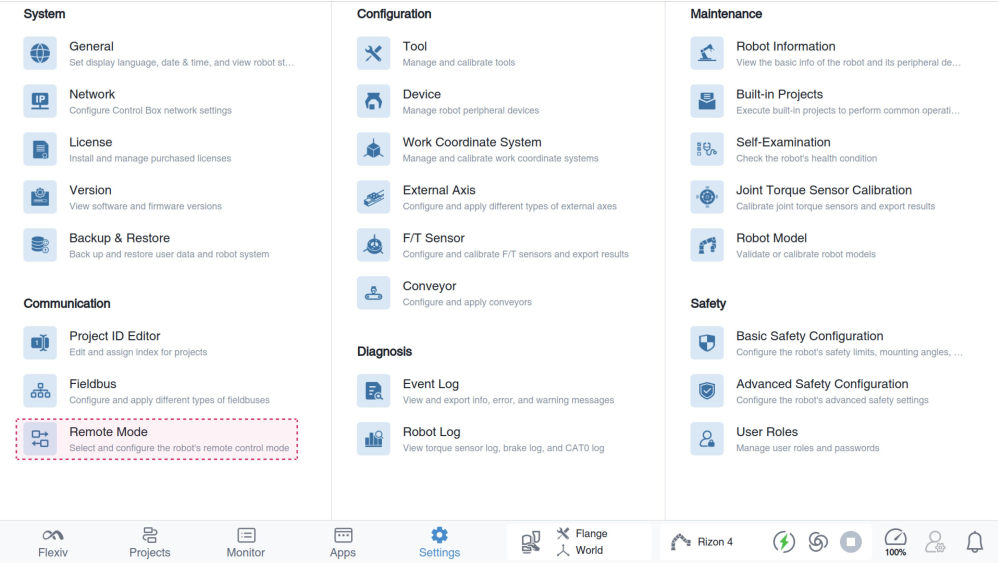
Go to Settings > Remote Mode on the Flexiv Elements.
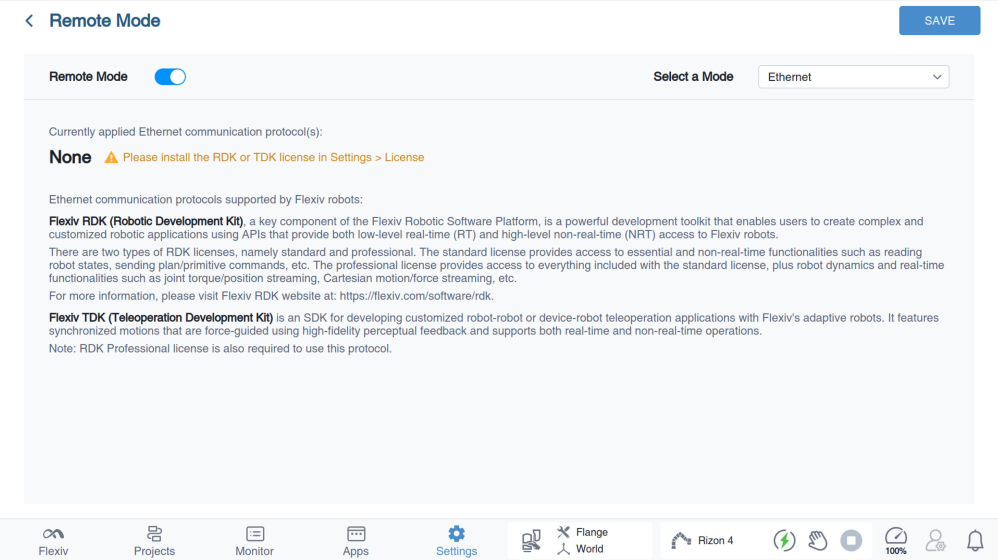
 To enable Remote Mode, turn on the toggle, then select Ethernet from the Select a Mode drop-down list
To enable Remote Mode, turn on the toggle, then select Ethernet from the Select a Mode drop-down list
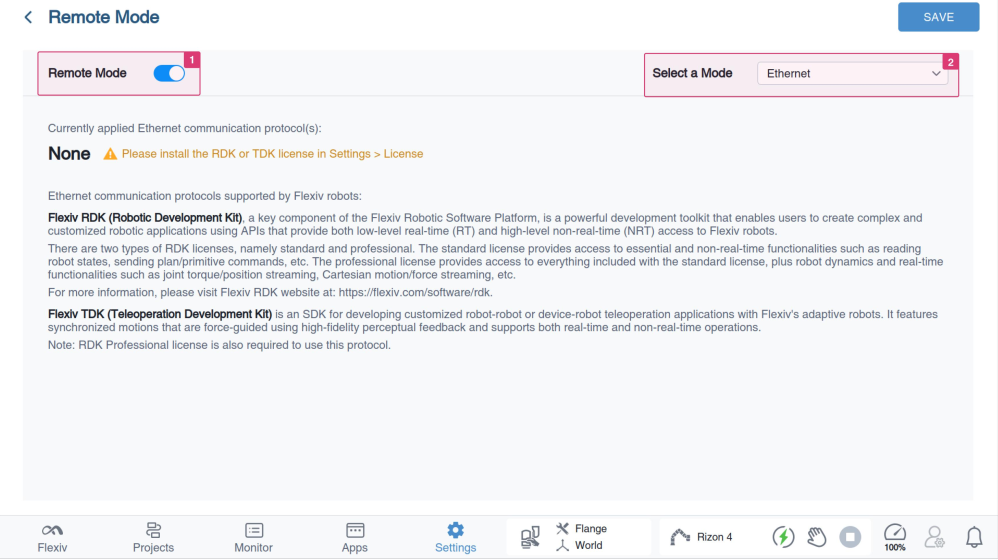
View the currently applied Ethernet communication protocol(s). If no license has been installed, you can install the TDK license in Settings >
License.
Step 3: Configure the network for leader robot and follower robot¶
The network configuration for the leader robot and follower robot can be done via the Flexiv Elements->Settings->Network.
Please refer to Flexiv Elements User Manual for more details.
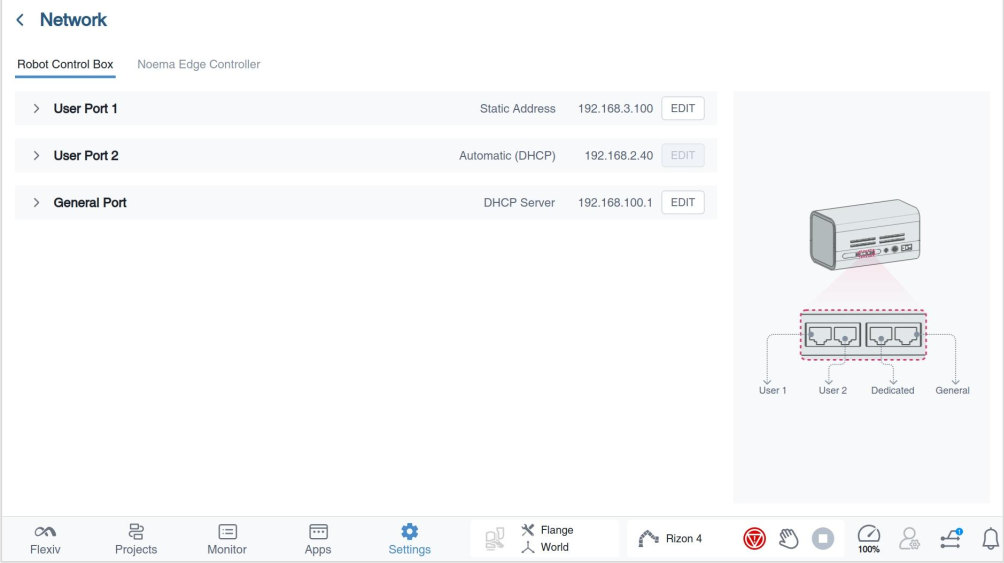
For LAN teleoperation, please set both robots and the user's computer to the same network segment with different IP Addresses (e.g., leader robot: 192.168.2.110, follower robot: 192.168.2.111 and user PC:192.168.2.112. All configured with a subnet mask of 255.255.255.0).
Step 4: Reboot the robots and ping test¶
After configuring the network and remote mode, reboot the robots. Connect the user's computer and two robots to the same ethernet switch. Ping the two control boxes to make sure all the devices are connected properly.